GIOMIC NEWS
データロガーで見るテスト結果。Vol.2(LSDテストの巻)《アーカイブ記事》
(この記事は2011/9/17に投稿された記事のアーカイブになります)

昨日に引き続き「データロガーで見るテスト結果」の第2弾です。毎回最初だけはヤケに更新ペースがいいのが玉に瑕ですがお許しを。。。
ということで、今回の本題です。まずは画像をご覧になって下さい。参考までにグラフの見方は昨日説明したとおりですので、おやっ??っと思ったら昨日のブログをご覧下さいね。
さて、今回のサンプルは先日行なった「スパ西浦モーターパーク」でのカーボンLSDの性能評価テスト走行の際のデータです。
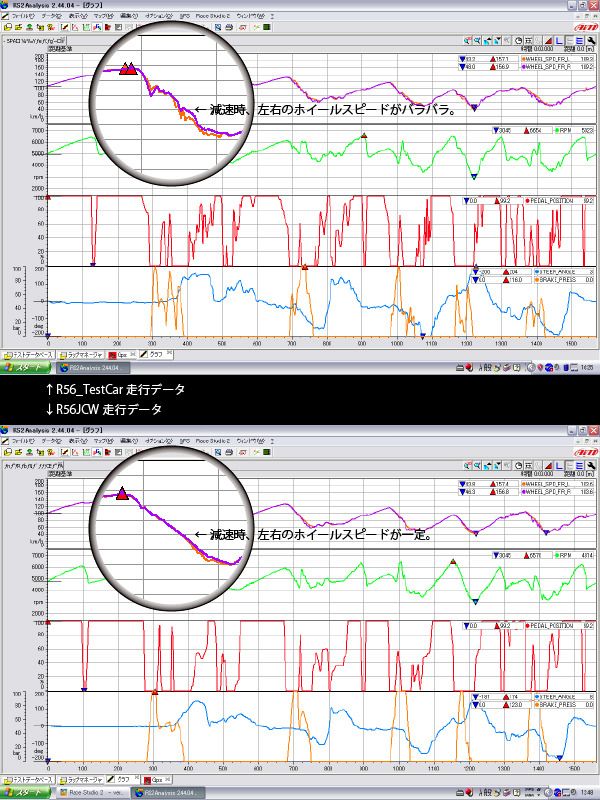
比較するグラフは以前に記録しておいた“R56TestCar”の走行データで、上のグラフがその“R56TestCar”の走行データ、下のグラフが今回の“R56JCW”の走行データとなります。実際のラップタイムは異なりますが、ドライバーは両方ともボク自身。X軸には距離を基準としていますので、どの場所でどうなっているのかということの確認を行ないました。
このデータで最も違いが分かり易いのが拡大してある部分。減速時の左右のホイールスピードです。“R56TestCar”に比べて“R56JCW”の方が減速の際の左右のホイールスピードの差が少ないことが確認出来ますよね。
これはカーボンLSDを使用する“R56JCW”がFF車両にも関わらず2way方式を採用していることが起因していて、アクセルオフなどの減速時にもしっかりとLSDが作動していることを表しています。対して、メタルLSDの1.1wayを採用する“R56TestCar”では減速時にはデフがフリー状態となりますので、減速及びブレーキング時などには駆動が抜けて車両がやや不安定な状態になっているというわけです。(※拡大している部分のアプローチだけでなく、画像では小さくてわかりずらいと思いますが、減速中のグラフ全てにおいて同じように変化しているのが解るでしょうか。)
ただし、クリップ後のアクセルオンでのレスポンスや縁石を跨ぐ様な状況下ではメタル製LSDのトラクションの良さがひかり、車速グラフの立ち上がりが鋭くなっていることも確認出来ます。
また、“R56JCW”でもステアリングを切り込んでいった時(旋回を開始)には、当然のことながら旋回の為の左右差が発生しますが、それでも“R56TestCar”と同じ位の差ですので、2way独特の引きずりが発生している訳でなく自然にデフが作動している状態であり、コーナークリップまでのステアリング舵角も似通っていることから、2wayで懸念していたコーナー進入時のアンダー傾向が強いということも無いともいえます。
実際にドライブしていても、ハードブレーキングや減速時にに意図せずクルマが左右に振られるということがないので、しっかりとブレーキングだけに集中できる為、安心してコーナーにアプローチ出来るたという印象です。
さらには、車両セッティングの違いもありますが、全体をとおして“R56JCW”の方が舵角が少ないということ。ストレート走行時のハンドルのフラツキも少ないということ。アクセルワークがイージであったということもこのデータから読み取れます。
と、あげればキリがなくなりますので、本日のところはこのくらいに。。
ではでは、また次回に詳しくご紹介しますのでお楽しみにぃ♪
(※注意:クルマの挙動の好みはドライバーのスタイルによっても分かれますので、今回のテストではどちらが優れるということを決めているものではありません。LSDのオン・オフがはっきりと解るメタル製が良いか、スムーズなロックを実現するカーボン製であれば、好みに応じて2wayという選択肢もあるよねっ。という結果をご理解頂ければと思います。)



《アーカイブ記事》){kind=link}